

Що таке роботизована рука? Найпоширеніший виробничий робот-маніпулятор або “роботизована рука”, складається з декількох сегментів, з’єднаних з забезпеченими кроковими двигунами або сервомоторами, що управляються комп’ютером. На робочій частині руки розташований ефектор — пристрій, що безпосередньо взаємодіє з об’єктами. Найчастіше, ефектор — одне з безлічі можливих захватних пристроїв, мұнда сатып алуға болады https://sprenergo.com.ua/644229303-pnevmatychni-zakhopliuvachi/, або інструмент обробки об’єктів. Про захоплювачі для роботів, їх різновиди та застосування читайте в цій статті.
Захватні пристрої для роботизованих рук
Ефектор робота – це фізичний інтерфейс між рукою робота та оброблюваною деталлю. Цей інструмент на кінці руки є однією з найважливіших частин робота.
Захват — різновид ефектора, призначений для утримання та переміщення деталей. Входить у прямий контакт з предметом, тому важливо вибрати правильний тип захоплення, що найбільше підходить для цільових об’єктів, який зможе надійно утримувати та не пошкодити ціль.
Роботизовані руки часто мають вбудовані сенсори, які повідомляють комп’ютеру, наскільки робот захоплює певний об’єкт. Це не дає роботу впустити або зламати деталь.
Інші види ефекторів:
- зварювальне, фрезерне або свердлильне обладнання,
- шуруповерти та гайковерти,
- розпилювачі для фарби або спеціальні захвати для певних типів об’єктів, 3D-друкарські екструдери, будівельний інструмент.
Існують також антропоморфні захвати, що повторюють кисть людської руки, але вони майже не застосовуються в промисловості (доки антропоморфні роботи не задіяні на виробництві), а призначені для дослідницьких і медичних цілей, наприклад — як частина протезів.
Сьогодні розробники дотримуються двох принципово різних підходів до проектування ефекторів:
- Універсальні захвати під будь-який тип інструменту чи завдання.
- Швидкозмінні вузькоспеціалізовані захвати.
Кожен підхід має як свої переваги, і недоліки, тому проектувальникам роботизованих виробництв доводиться враховувати економічну доцільність обох підходів. Сьогодні найбільш поширеними є вузькоспеціалізовані захоплення.
Види захватів

Захоплення розрізняються за такими типами:
- За принципом дії:
- механічні;
- магнітні;
- вакуумні;
- з еластичними пневматичними чи гідравлічними камерами.
- За характером базування об’єктів:
- базують (переміщують об’єкти в задану область);
- перебазуючі (здатні змінювати становище об’єктів у тому числі щодо себе);
- центруючі;
- підтримуючі;
- фіксуючі.
- За характером кріплення:
- незамінний;
- змінні;
- швидкозмінні;
- з автоматичною заміною.
- По виду управління:
- некеровані;
- командні;
- жорстко програмовані;
- адаптивні.
- За типом губок:
- жорсткі;
- регульовані;
- пружні;
- пластичні.
- За типом приводу:
- пружинні;
- пневматичні;
- гідравлічні;
- електромеханічні.
Як обрати захоплювач
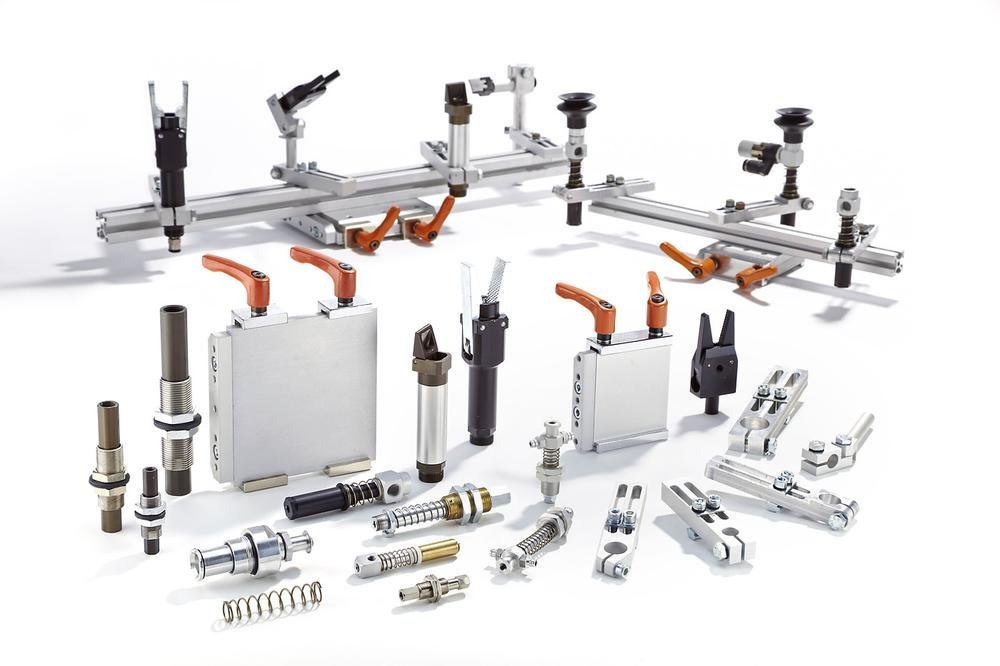
Комплектація та важливі схеми можуть сильно відрізнятися у різних виробників. Розглянемо типову класифікацію з прикладу Gimatic.
Комплектація EOAT виконується за допомогою окремої програми, що автоматично враховує все необхідне оснащення при виборі. Кожна частина EOAT оснащена RFID-міткою, а саме захоплювач-RFID-контролером, що автоматично зчитує мітки та не допускає неправильного складання.
EOAT складається з пристрою на боці робота та на стороні захвату, керуючого пристрою (контролера), інтерфейсних кабелів, пневматичної або електричної системи. одан басқа, захоплювач можна оснастити додатковою підвіскою, сенсорами, лінійними приводами та напрявляючими, окремим блоком живлення, гальмівною системою.
Пневматичний/електричний пристрій обертання захвату відповідає за:
- обертання;
- нахил;
- поворот;
- поворот столу.
Пристрої призначені як для обертання, нахилу чи повороту як самих захватів у різних режимах, так обертання столу з деталлю.
Влаштування швидкої зміни захоплювача з клапаном безпеки і без:
- модуль ідентифікації RFID;
- влаштування швидкої зміни захоплення з боку робота/захоплювача;
- влаштування автоматичного центрування з боку робота/захоплювача;
- пневматичний привід пристрою швидкої зміни захвату;
- влаштування швидкої зміни захоплення зі пружинами.
Такий тип пристрою забезпечує швидку зміну захвату на роботизованій руці, контроль правильності комплектації, захист від надлишкового тиску, сумісність з роборуками різних виробників.
Модульний захоплювач:
- монтажна база EOAT;
- монтажні комплекти.
Дозволяє самостійно створити з комплектуючих захоплювачі будь-якого розміру, різних типів та вантажопідйомності.
Паралельні пневматичні/електричні захвати:
- Мають високу точність, повторюваність і навантажувальну здатність у найширших межах. Можуть додатково комплектуватися іншим обладнанням, наприклад свердлильним або зварювальним агрегатом.
Кутові пневматичні/електричні захвати:
- Мають велике стиснення, що застосовується, мысал, для різання металу. З іншого боку, можливість використання різних сенсорів дає можливість вкрай делікатного та високоточного працювати з деталлю. Як і паралельні захвати, кутові можуть комплектуватись додатковим обладнанням.
Захоплювачі з надувними камерами:
- Незамінні при роботі з крихкими предметами, мысал, для переміщення скляних банок або пляшок, фарфору, лабораторного скла. Можуть фіксувати деталь як зовні, так і зсередини.
Однопальцеві захвати:
- пневматичні захоплювачі;
- кутові пневматичні захоплювачі;
- перпендикулярні пневматичні захоплювачі.
Пневматичний магнітний захват:
- Радіальні пневматичні/електричні захвати:
- За призначенням схожі з кутовими, бірақ, әдетте, мають можливість самоцентрування.
- Трипроменеві пневматичні/електричні захвати:
- Призначені для надійної фіксації циліндричних деталей.
Вакуумні захоплювачі:
- Служать для роботи з крихкими та гладкими деталями, мысал, з автомобільним склом або листами полікарбонату.
Сенсори для захоплень:
- Магнітні;
- Індуктивні;
- Ультразвукові;
- Оптичні;
- Аналогтар;
- Перевантаження;
- Для крихких деталей.
Кейси застосування
Автоматизація контролю якості, DIEHL Aerospace , Німеччина
Diehl Aerospace виготовляє комп’ютерні системи для Airbus A350 XWB. Після отримання великого контракту перед керівництвом компанії постало завдання різко збільшити продуктивність відділу тестування якості. Був вибір: додати дорогу нічну зміну із «живих» співробітників, збільшити термін виконання контракту чи автоматизувати низку процесів.
Компанія Diehl Aerospace обрала роботизований маніпулятор Universal Robots UR10 , оснащений парою адаптивних захоплювачів Robotiq 2F-85 і датчиком моменту FT 300 для автоматизації. Робот відповідає за точну вставку крихкого корпусу комп’ютера у випробувальне обладнання, причому кожен електричний інтерфейс, вхід, вихід та датчик проходять подвійну перевірку.
Складання капсул для кавомашин, GIMATIC в TECMES
Tecmes не влаштовували поточна якість та низька швидкість складання капсул, нерівномірність ущільнення кавового порошку та високе енергоспоживання існуючого обладнання. З цієї причини компанія, що базується в Vaiano Cremasco (комуна Вайано-Кремаско, область Кремона, регіон Ломбардія, Італія), звернулася до Gimatic за постачанням пневматичних захватів для позиціонування та переміщення капсул.
В основному це модель XP20-A – захоплювач розроблений для потреб харчової промисловості. XP20-As оснащені щелепами з нержавіючої сталі та напрямними з ацетальної смоли. Останнє необхідно для належного ущільнення та запобігання потраплянню порошку кави (та інших продуктів на харчовому виробництві) у механізм захоплювача. Також Gimatic оснастив Tecmes високоефективними компактними захватами (SGP мають ефективність використання енергії 95%) та високошвидкісними захватами (HS працюють із частотами від 5 дейін 6 Hz).
Автоматизація полірування скла, Saint-Gobain , France
На заводі Сен-Гобен у Сюлі-сюр-Луар, Франція, використання людської праці призводило до високої вартості готового продукту. У прагненні зробити виробництво ефективнішим і звільнити співробітників від завдань, що повторюються, компанія Saint-Gobain захотіла автоматизувати виснажливий процес полірування скла. Для вирішення завдання треба було запрограмувати складні рухи, що відрізняються для кожної невеликої серії виробів зі скла.
Використовуючи запис траєкторії датчика крутного моменту Robotiq FT 300 , оператор показує пристрою послідовність рухів, Universal Robots UR10 записує і потім відтворює рух оператора. Так збільшується швидкість і точність обробки, не, зрештою, суттєво зменшує собівартість продукції.
Висновки
Вибір
Не буває універсальних захватів, які б однаково добре справлялися з будь-якою роботою — застосовувані захоплення роботів повинні відповідати розміру, вазі та жорсткості об’єктів, з якими вони працюють.
Як і у випадку з роботами в цілому, розробники та користувачі повинні враховувати дуже різні, численні вимоги що іноді суперечать один одному — по швидкості роботи, точності, сили впливу, форми деталі, типу виконуваних робіт та забезпечення безпеки.
Постачальники робототехніки все частіше пропонують комплексні рішення, що покривають широкий сегмент завдань, у тому числі датчики та програмне забезпечення. Велика увага сьогодні приділяється розробці ефекторів, які прості у встановленні та використанні, а також можуть бути встановлені на маніпулятори будь-яких виробників.
Перспективи
Серед останніх трендів у розвитку роботизованих маніпуляторів — використання штучного інтелекту, що дозволяє досягти ще більшої простоти та швидкості навчання робота необхідним діям, гнучкості у вирішенні складних завдань. Розширюється і сфера використання: за даними Асоціації робототехнічної промисловості, використання EOAT у 2017 році зросло на 14% в автопромі та до 20% в інших областях.
Модернізація підприємств із застосуванням автоматизованих систем значно збільшує продуктивність, саме тому застосування робототехніки — обов’язковий елемент розвитку будь-якого виробництва, що забезпечує не тільки конкурентні переваги, але й найчастіше саме виживання бізнесу.